
This content originally appeared on DEV Community and was authored by pojiro
Introduction
The title says it all, I just tried porting Nerves and got it working!
So, for someone who are going to try porting like me, here is a summary of the key points of the process.
Target machine
The target machine is OS-free CPU module of e-RT3 Products which is made by Yokogawa Electric Corp.
myasu has been writing several articles about it on Qiita, one of Japanese tech web sites.
One day he gave me the idea of porting,
- If we could port Nerves onto this, we can get the industrial robust hardware Nerves ?
It Sounds very nice!! So this hardware became the target machine for us.
About e-RT3
This OS-free CPU module is a very unique controller that allows users to freely select the OS they want to run. For this reason, its booting specifications docs and the Linux kernel source are provided.
The specifications/sources are open so that users can freely select the OS they want to run, which made this porting successful. It's cool the info is open.?
In this article, I will refer to it as "e-RT3" instead of "OS-free CPU module"(cause little bit long).
Porting outline
The porting procedure of Nerves is described in README of nerves_system_br as follows:
- Create a minimal Buildroot
defconfigthat boots and runs on the board. This doesn't use Nerves at all.- If the
defconfigrequires a writable root filesystem, figure out how to make it read-only. This should be pretty easy unless you're usingsystemd. Since Nerves uses a custom init system, keep in mind for later thatsystemdmay be helping initialize something on the board that will need to be done manually later.- Take a look at the Flash memory layout and compare that to the layouts used in one of the supported systems. We use fwup to create images. There's a lot of variety in how one can lay out Flash memory and deal with things like failbacks. At this point, just see if you can get
fwupto create an image.- Clone one of the official systems that seems close for your board. Update the
nerves_defconfigbased on the Buildrootdefconfigthat works.- Build the system using
mixor manually by running thecreate-build.shscript.
I went through the steps in this order, but in retrospect, the first thing I needed to do was to understand the how the target machine boots.
Once I understood this, I was able to finish step 2 above by learning how to use Buildroot and creating the kernel and dtb. Steps 3, 4, and 5, I use nerves_system_rpi3 as base and made modifications. This is a difficult part to describe what I did.
First, understand how the target machine(e-RT3) boots
When e-RT3 is turned on, it reads the boot loader, U-Boot, in its internal ROM and starts up.
The U-Boot checks if there is a uEnv.txt in the SD slots 1 and 2, and if there is, e-RT3 operates according to the file. The uEnv.txt is like a script for U-boot.
The provided Ubuntu image has a uEnv.txt, which was very helpful for me as a working reference.
Key points of uEnv.txt
The key points of uEnv.txt are,
- Where the kernel and dtb should be located.
- This is determined by the configuration of the SD image you are creating.
- Where (address) in RAM should they be loaded?
- This is determined by the specification of target machine. In case of e-RT3, documented.
- Adjust kernel parameters (root=rootfs device, etc.)
- In case of e-RT3, Ubuntu's kernel image has a uEnv.txt. I could use it with modifications.
This is the first step.
Once you know the above, you can use uEnv.txt to load the kernel and dtb into the target machine's RAM, pass the kernel parameters, and boot the kernel with uBoot's bootm/z command.
Next, use Buildroot to create the kernel, dtb, and rootfs.
Once you know how the target boots, you will know that you need to create the kernel, dtb, and rootfs. These can be created by downloading, configuring and compiling the Linux kernel sources, but Nerves use Buildroot to do this.
Buildroot is a tool of configuring Linux systems (kernel, dtb, rootfs) for embedded use.
The make menuconfig used in the Linux kernel sources is also available in Buildroot (wrapped for Buildroot) and can be configured.
Depending on the configuration, Buildroot will download what it needs and cross-compile it on the host machine.
What it needs are, for example
- The specified version of the Linux kernel sources
- Kernel patches (ex. real-time patches)
- A cross compiler (a compiler that creates binaries for the target machine)
- fwup for image creation
- ...etc.
Buildroot allows us to build a linux system with only configuration if the board is registered in Buildroot.
e-RT3 is not registered, so I needed to create the corresponding configuration.
e-RT3 Linux kernel source investigation and kernel generation
By investigating the provided kernel sources, I found that it would be configured as follows.
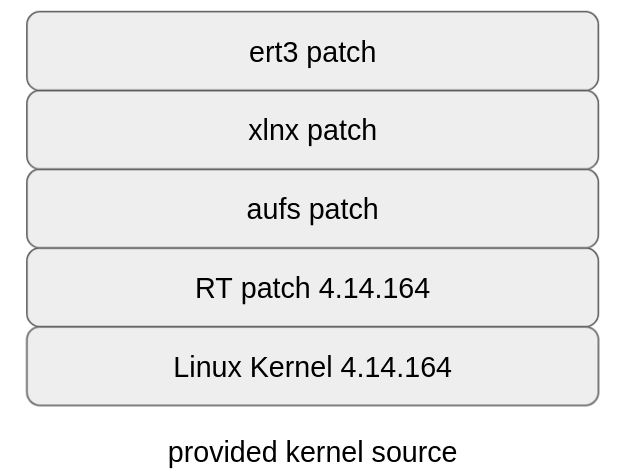
e-RT3 uses the Xilinx Zynq-7000, and it seemed that Xilinx linux-xlnx code is partially applied.
The two bottom rows can be downloaded by configuring Buildroot.
So, if I could prepare a patch for the upper two, I could make a kernel that would cover the functions of e-RT3.
(The aufs patch is not necessary for Nerves, so I ignored it.)
Therefore, I made a kernel source consisting of the lower three rows shown in the above figure, and made a mixed patch of the upper two rows from the difference between that and the provided kernel source, so that the final kernel source would be shown in the figure below.
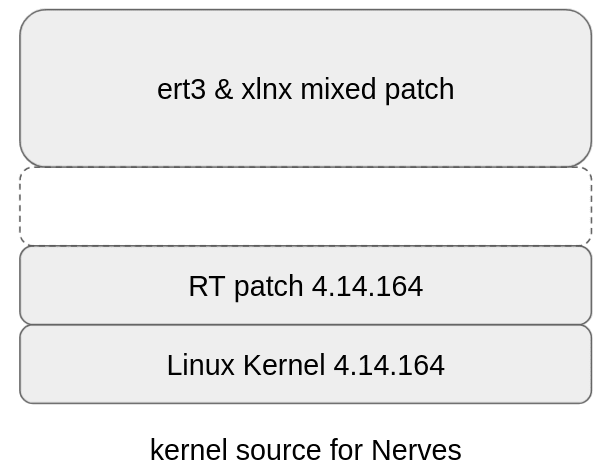
After creating the mixed patch, follow the Buildroot reference to create the necessary configuration files in the board directory, and then generate the kernel. (I'll spare you the details.
I only read the following two references which can be accessed from https://buildroot.org/docs.html. Both are excellent, easy to understand documents.
-
The Buildroot user manual
- I read Chapter 9 carefully.
-
Bootlin's Buildroot Training slides
- It's about 350 pages, but you don't have to read all of it; just do a search on the keywords you want to know, you'll find the answer to your question with a high probability.
The br2-external for e-RT3 I created is available here, br2-external-f3rp70.
booting the created kernel
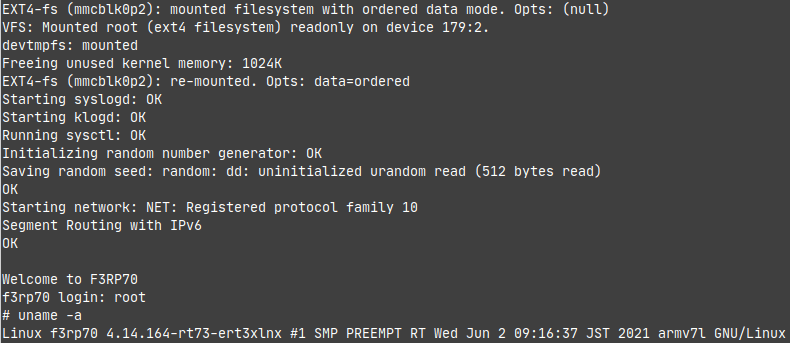
Burn image (buildroot-dir/output/images/f3rp70.img) to SD,
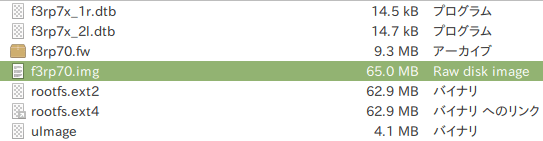
Connect the serial cable and turn on, and I could confirm booting the minimal Linux created by Buildroot.
Finally, fit it in so that it becomes Nerves
It's difficult to describe what I did, but nerves_system_f3rp70 that I created is based on nerves_system_rpi3. So you can see what I changed by looking at the diff between them.
NOTE: In the fitting, I renamed the Buildroot's defconfig to nerves_defconfig for nerves_system_f3rp70.
Buildroot minimal Linux becomes Nerves!!
Hi, Nerves!!!

Once Nerves is ported
- Elixir's strengths in concurrency and process monitoring/recovering are fully revealed.
- We can use Elixir libraries to their fullest extent.
For example,
- The monitoring/recovering process that was done with systemd or shell scripts in the normal Linux environment can be replaced with Elixir's Supervisor/GenServer.
- Nginx and Apache can be replaced by Elixir's Phoenix.
And there are no configuration files scattered around /etc.
These are strengths of Nerves which use Elixir and hide the Linux details.
- Addendum: I've published it on hex.pm, yey -> https://hex.pm/packages/nerves_system_f3rp70
e-RT3 specific support
The e-RT3's IO needs to be accessed through libm3.so which is provided from Yokogawa.
For example, DIO is not a GPIO, we can't use circuits_gpio. So, we need to use NIFs as myasu did in Real-time OS controller e-RT3 (controlled from Elixir).
It will be a good idea that creating a library such as circuits_gpio.
Summary
- Industrial robust hardware, e-RT3 from Yokogawa Electric Corp
meets
- Nerves, a game changer of embedded Linux development experience
???
This experience has given me the confidence that I can do simple porting if
- I get the boot specification
- I have working kernel sources (including dts).
Acknowledgements
- myasu for the porting idea.
- Yokogawa Electric Corp for providing info openly
- Nerves on our side
Thank you!!
This content originally appeared on DEV Community and was authored by pojiro
pojiro | Sciencx (2021-06-10T12:44:57+00:00) Elixir on Industrial Hardware, porting Nerves to e-RT3. Retrieved from https://www.scien.cx/2021/06/10/elixir-on-industrial-hardware-porting-nerves-to-e-rt3/
Please log in to upload a file.
There are no updates yet.
Click the Upload button above to add an update.