
This content originally appeared on HackerNoon and was authored by Linearization Technology
Table of Links
2. Mathematical Description and 2.1. Numerical Algorithms for Nonlinear Equations
2.4. Matrix Coloring & Sparse Automatic Differentiation
3.1. Composable Building Blocks
3.2. Smart PolyAlgortihm Defaults
3.3. Non-Allocating Static Algorithms inside GPU Kernels
3.4. Automatic Sparsity Exploitation
3.5. Generalized Jacobian-Free Nonlinear Solvers using Krylov Methods
4. Results and 4.1. Robustness on 23 Test Problems
4.2. Initializing the Doyle-Fuller-Newman (DFN) Battery Model
4.3. Large Ill-Conditioned Nonlinear Brusselator System
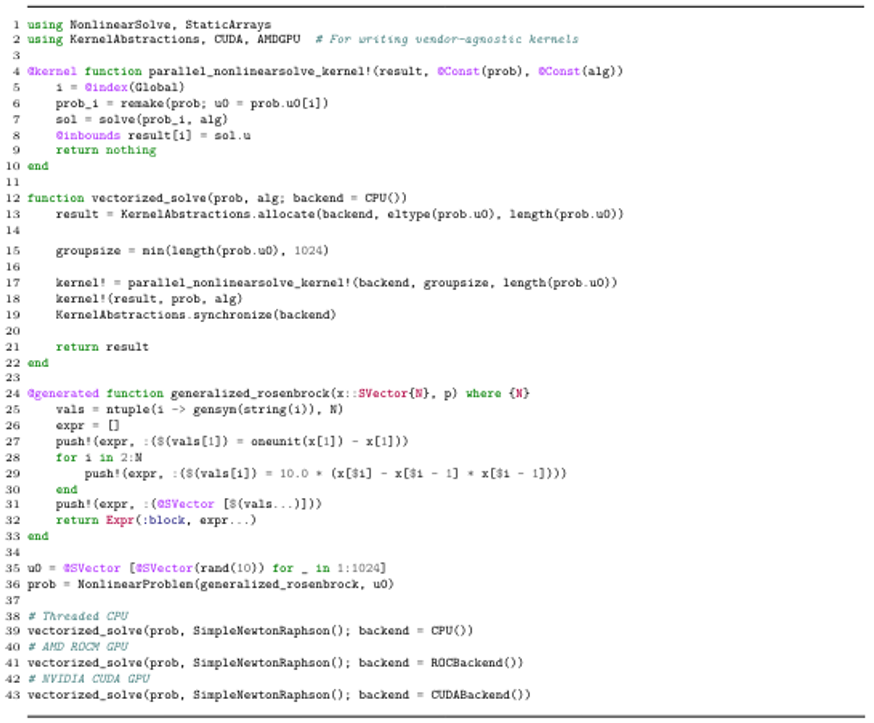
3.3. Non-Allocating Static Algorithms inside GPU Kernels
NonlinearSolve.jl comes bundled with SimpleNonlinearSolve.jl, which provides specialized non-allocating solvers for extremely efficient solving of very small nonlinear systems on GPUs. These solvers implement algorithms like Newton-Raphson and Trust-Region as static, non-allocating routines that operate directly on StaticArrays of fixed size, avoiding the overhead of allocations and dynamic dispatch. This makes them ideal for embedding inside GPU kernels using KernelAbstractions.jl [55] to solve many independent small nonlinear systems in parallel across GPU threads. In the following example, we solve the generalized Rosenbrock problem [Equation (2.12)] for 1024 different initial conditions on CPU, AMD ROCm GPUs and NVIDIA CUDA GPUs using the same code.
\
\ The simpler solvers outperform the more general solvers in NonlinearSolve.jl significantly for small static problems [Figure 6]. Their high performance enables applications like massively parallel global optimization [56] and parameter estimation problems, where solving many small independent nonlinear systems on the GPU is advantageous. SimpleNonlinearSolve.jl provides a portable, vendor-agnostic implementation that can target different GPU architectures like CUDA, ROCm, etc., with the same code.
\
:::info This paper is available on arxiv under CC BY 4.0 DEED license.
:::
:::info Authors:
(1) AVIK PAL, CSAIL MIT, Cambridge, MA;
(2) FLEMMING HOLTORF;
(3) AXEL LARSSON;
(4) TORKEL LOMAN;
(5) UTKARSH;
(6) FRANK SCHÄFER;
(7) QINGYU QU;
(8) ALAN EDELMAN;
(9) CHRIS RACKAUCKAS, CSAIL MIT, Cambridge, MA.
:::
\
This content originally appeared on HackerNoon and was authored by Linearization Technology
Linearization Technology | Sciencx (2025-03-27T00:18:41+00:00) Non-Allocating Static Nonlinear Solvers for GPU Kernels: Speed and Efficiency. Retrieved from https://www.scien.cx/2025/03/27/non-allocating-static-nonlinear-solvers-for-gpu-kernels-speed-and-efficiency/
Please log in to upload a file.
There are no updates yet.
Click the Upload button above to add an update.